

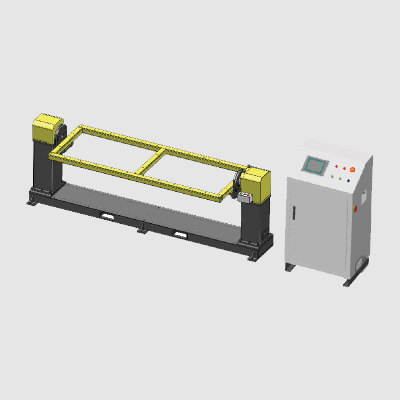








I型变位机
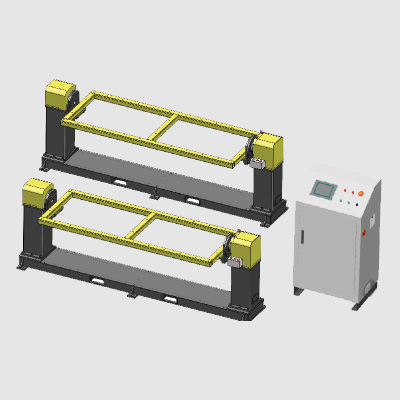
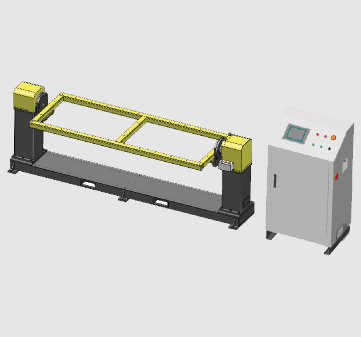
双I型变位机
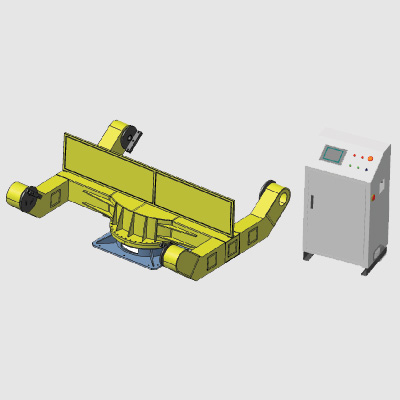
R型变位机
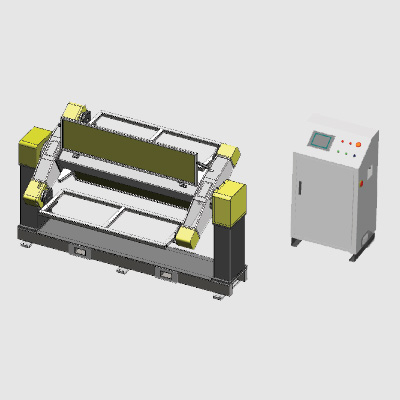
K型变位机
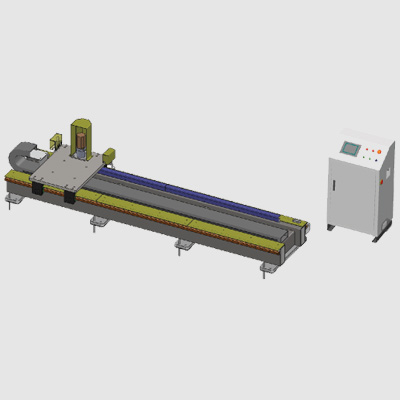
行走驱动小车和行走轨道
采用一端主动另一端随动的结构,主动端和随动端有两个支柱支撑,立柱下面是连接底座。
整体结构紧凑,能实现工件绕水平轴±360°。
| 额定转速(rpm) | 15 |
| 最大转速(rpm) | 20 |
| 负载(kg) | 300 |
| 工装框架(mm) | 长≤2200宽≤800 |
| 自动翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.05(半径500mm处) |

是由两台绕水平轴旋转的单轴I型变位机组成。
能实现工件绕水平轴±360°的旋转,结构紧凑。
| Ⅱ、Ⅲ轴减速机 | RV-40E-121 |
| Ⅱ、Ⅲ轴回转半径(mm) | 500 |
| Ⅱ、Ⅲ轴最大转速(rpm) | 20 |
| 单边负载(Kg) | 300 |
| 各轴翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.09(半径500mm处) |
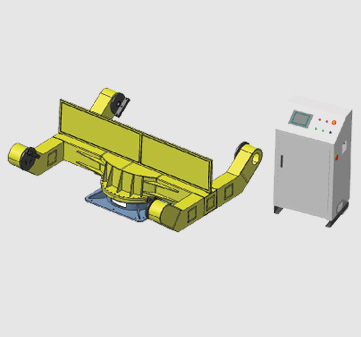
是一种组合式的三轴变位机,Ⅰ轴可绕竖直轴旋转,Ⅱ轴和Ⅲ轴分布在Ⅰ轴两侧且可绕各自轴水平旋转。
Ⅰ轴旋转可实现工位的变换,Ⅱ、Ⅲ轴采用一端主动另一端随动结构,可实现工件±360°的翻转。
| Ⅱ、Ⅲ轴减速机 | RV-40E-121 |
| Ⅱ、Ⅲ轴回转半径(mm) | 500 |
| Ⅱ、Ⅲ轴最大转速(rpm) | 20 |
| 单边负载(Kg) | 300 |
| 各轴翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.09(半径500mm处) |
一种组合式的三轴变位机,Ⅰ轴可绕水平轴翻转,Ⅱ轴和Ⅲ轴分布在Ⅰ轴两侧且可绕各自水平翻转。
三个轴均采用一端主动另一端随动的结构,Ⅰ轴翻转可实现工位的变换,Ⅱ、Ⅲ轴翻转可实现工件±360°的翻转。
| 额定转速(rpm) | 15 |
| 最大转速(rpm) | 20 |
| 负载(kg) | 300 |
| 工装框架(mm) | 长≤2200宽≤800 |
| 自动翻转角度 | ±360° |
| 翻转重复定位精度(mm) | ±0.05(半径500mm处) |
是一种由精密伺服电机驱动,精密齿轮和齿条传动,配有精密滑块和直线导轨的机构组成。
采用封闭式拖链保护,可配置自动润滑的油箱。传动稳定可靠,精度高,一致性好,具有很强的安全性。
| 最高速度(m/s) | 1 |
| 额定速度(m/s) | 0.6 |
| 加速时间(s) | 0.4-1 |
| 最大转速(rpm) | 20 |
| 负载(Kg) | 1000 |
| 底座宽度(mm) | 720 |
*产品以实样为准,产品外观及技术数据如有变更,恕不事先通知。本公司拥有对网页的最终解释权,对页面错误不承担任何责任。

